// Steeply code using IR remote
// Include the necessary libraries for the Servo motor and IR remote
#include IRremote.h
#include Servo.h
// Assign each object to its pin on the Arduino
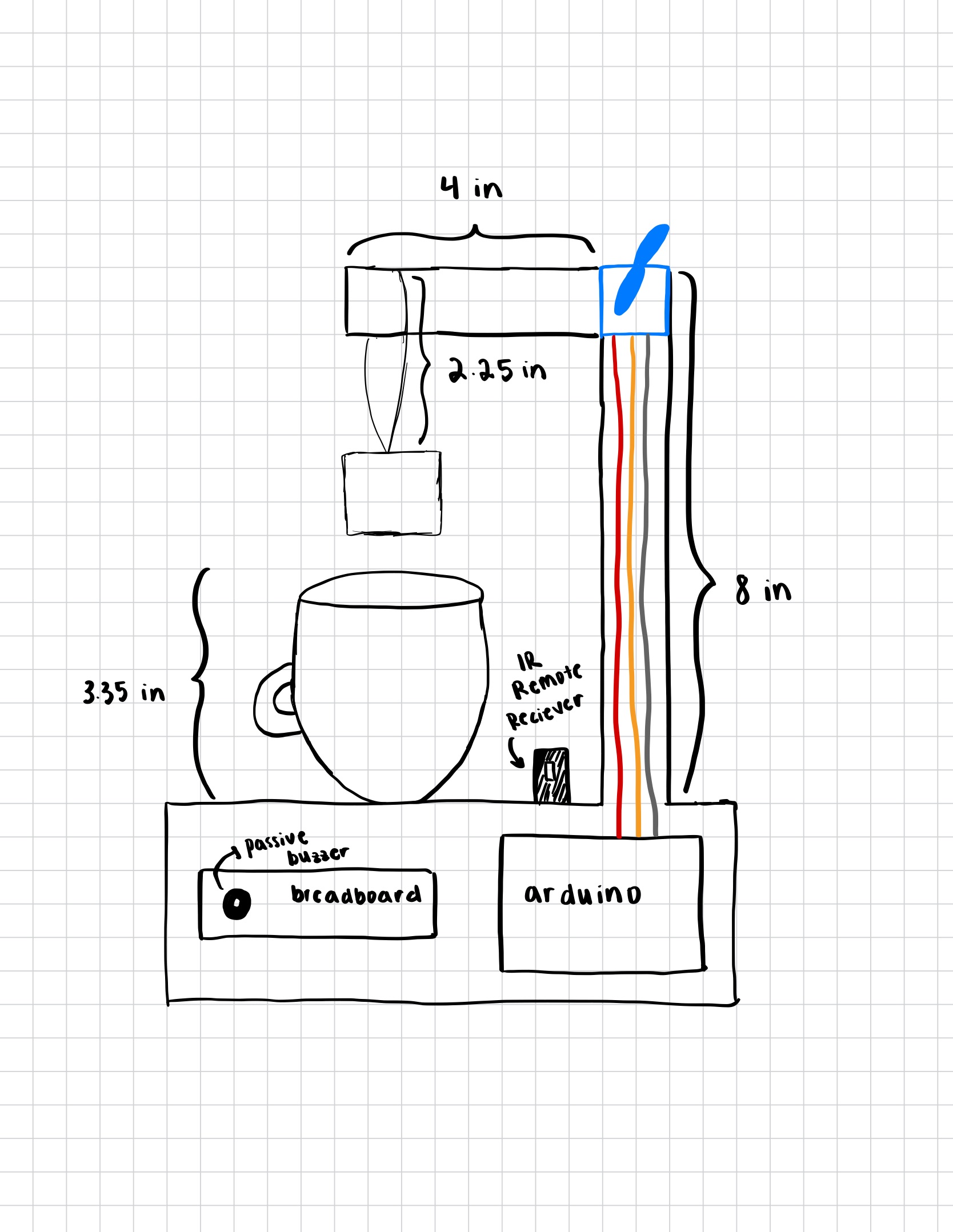
const int IR_RECEIVE_PIN = 3; // IR receiver OUT pin
const int servoPin = 9; // Servo pin
const int buzzerPin = 12; // Passive buzzer pin
// Create servo object
Servo teaServo;
// Pre-set tea steep times based on tea type: green, herbal, or black
// Using 'UL' makes the number an Unsigned Long, which matches Arduino's
// millis() timing type. This ensures long delays work correctly!
// U = unsigned = positive integer only
// L = long = 32-bit integer on Arduino
const unsigned long GREEN_TIME = 120000UL; // 2 minutes
const unsigned long HERBAL_TIME = 480000UL; // 8 minutes
const unsigned long BLACK_TIME = 300000UL; // 5 minutes
// Set the two servo positions that I will be using
const int UP_POSITION = 90; // Tea bag lifted
const int DOWN_POSITION = 0; // Tea bag lowered
// Have a default tea selection
unsigned long selectedSteepTime = GREEN_TIME; // default green
// Create a boolean variable to track the state of the button to prevent
// automatic repeating of the cycle
bool steepInProgress = false; // Prevents repeating cycle
// IR Remote button values according to my serial monitor
const int BTN_GREEN = 12; // user pressed "1"
const int BTN_HERBAL = 24; // user pressed "2"
const int BTN_BLACK = 94; // user pressed "3"
const int BTN_PLAY = 64; // user pressed "PLAY"
// Setup function
void setup() {
Serial.begin(9600);
// Start IR receiver
IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);
// Attach servo and set its initial position
teaServo.attach(servoPin);
teaServo.write(UP_POSITION);
// Print this message to the serial monitor to help with debugging
// and to know exactly what step the computer is at in the code
Serial.println("Steeply Ready! Use remote to choose tea type.");
}
// Main loop
void loop() {
// Check if any IR signal has been received
if (IrReceiver.decode()) {
// If a button on the remote has been pressed, print exactly which
// button was pressed
int command = IrReceiver.decodedIRData.command;
Serial.print("Button pressed: ");
Serial.println(command);
// Figure out what tea has been selected via the remote
// Set the steep time according to which button has been pressed
if (command == BTN_GREEN) {
selectedSteepTime = GREEN_TIME;
Serial.println("Tea type selected: GREEN (2 min)");
}
if (command == BTN_HERBAL) {
selectedSteepTime = HERBAL_TIME;
Serial.println("Tea type selected: HERBAL (8 min)");
}
if (command == BTN_BLACK) {
selectedSteepTime = BLACK_TIME;
Serial.println("Tea type selected: BLACK (5 min)");
}
// Start steeping tea if the user has pressed "play" on the remote
if (command == BTN_PLAY && !steepInProgress) {
steepInProgress = true;
startSteeping(selectedSteepTime);
}
// Prepare IR receiver for next signal
IrReceiver.resume();
}
}
// Function to start the tea steeping process
void startSteeping(unsigned long steepTime) {
Serial.println("Starting steeping process");
// Lower the tea bag slower than the default servo speed
Serial.println("Lowering tea bag slowly...");
// Decide direction: +1 if need to increase, -1 if need to decrease
int step;
if (UP_POSITION < DOWN_POSITION) step = 1;
else step = -1;
// Move from UP_POSITION toward DOWN_POSITION one degree at a time
for (int pos = UP_POSITION; pos != DOWN_POSITION; pos += step) {
teaServo.write(pos);
delay(15); // the delay affects the speed of the motion!
}
// Ensure final exact position
teaServo.write(DOWN_POSITION);
delay(500); // brief pause once fully lowered
// Wait for steep time
Serial.print("Steeping for ");
Serial.print(steepTime / 1000);
Serial.println(" seconds");
delay(steepTime);
// Now lift the tea bag slowly (reverse direction)
Serial.println("Lifting tea bag slowly...");
// Reverse step for lifting (invert the direction)
step = -step;
for (int pos = DOWN_POSITION; pos != UP_POSITION; pos += step) {
teaServo.write(pos);
delay(15);
}
// Ensure final exact position
teaServo.write(UP_POSITION);
delay(500); // pause once lifted
// Play the buzzer melody when tea is steeped and the bag is
// lifted out of the cup
playMelody();
// Reset for the next cup of tea
steepInProgress = false;
Serial.println("Steep complete! Ready for next tea");
}
// Function to create a little melody for the passive buzzer
// when steeping is over. I wanted to do this so that the sound
// isn't so jarring or "unattractive" when the tea is done steeping!
void playMelody() {
Serial.println("Playing melody...");
// Set the tone of the buzzer by mapping it to certain notes
// small delay to create a small break between each note
tone(buzzerPin, 660, 200); // E5
delay(250);
tone(buzzerPin, 880, 200); // A5
delay(250);
tone(buzzerPin, 990, 200); // B5
delay(250);
tone(buzzerPin, 1320, 350); // E6
delay(400);
noTone(buzzerPin);
}